
Toshihiko Fukushima
Ph.D. Student
Heisenbergstraße 3
70569 Stuttgart
Germany
Toshihiko Fukushima is a Ph.D. student in the Robotic Materials department at the Max Planck Institute for Intelligent Systems. He has background in robotics and automotive areas. His current fields of interest are bio-inspired robotics, dynamic locomotion, and soft robotics.
He received his Bachelor's degree in Engineering from Toyota Technological Institute in 2012 and his Master's degree in Interdisciplinary Information Studies from The University of Tokyo in 2014. After that, he has worked as an automotive engineer at Toyota Motor Corporation, Toyota Motorsport GmbH, and NTN Walzlager (Europa) GmbH.
bio-inspired robot dynamic locomotion soft robotics
Educations
-
Ph.D. candidate
Max Planck Institute for Intelligent Systems, Germany, 2021-2024,
Robotic Materials Dept. | Prof. Christoph Keplinger -
M.A.S. in Information Studies,
The University of Tokyo, Japan, 2014,
Intelligent Systems and Informatics Lab. | Prof. Yasuo Kuniyoshi -
B.E.
Toyota Technological Institute, Japan, 2012,
Control System Lab. | Prof. Tatsuo Narikiyo
Working experiences
-
Doctoral Researcher (2021 - present)
Max Planck Institute for Intelligent Systems, Germany
Research soft robotics with HASEL type actuators -
Research Engineer (2020 - 2021)
Max Planck Institute for Intelligent Systems, Germany
Research morphological intelligence of animals with robotic experiments -
Application Engineer (2019 - 2021)
NTN Wälzlager Europa GmbH, Germany
Develop bearing systems for automotive systems -
Control System Engineer (2017 - 2018)
Toyota Motorsport GmbH, Germany
Develop an active suspension system -
Chassis Control Engineer (2014 - 2018)
Toyota Motor Corporation, Japan
Develop steering by-wire systems, power steering systems, compact EV -
Technical Assistant (2012 - 2013)
The University of Tokyo, Japan
Maintain servers and websites -
Student intern (2011 - 2011)
Toyota Boshoku Corporation
Develop an EV charging system
Honors
-
Young Investigation Excellence Award, RSJ, 2014
-
Scholarship for Students with Outstanding Achievements, JASSO, 2014
-
Student Travel Grant, AMAM, 2013
-
Presentation Award, SICE SI, 2012
Journals
-
2022 | Sports Biomechanics,
T. Fukushima, Satoshi Nishikawa, Yasuo Kuniyoshi, “Active Pole Bending Effect in Pole Support Phase” (DOI, video) -
2021 | Integrative and Comparative Biology, vol. 61, no. 2, pp. 589–602
T. Fukushima, R. Siddall, F. Schwab, S. L. D. Toussaint, G. Byrnes, J. A. Nyakatura and A. Jusufi, “Inertial tail effects during righting of squirrels in unexpected falls: from behavior to robotics” (DOI, video) -
2021 | Advanced Robotics, vol. 35, no. 7, pp. 437–449
R. Siddall, T. Fukushima, D. Bardhi, B. Perteshoni, A. Morina, E. Hasimja, Y. Dujaka, G. Haziri, L. Martin, H. Banerjee and A. Jusufi, “Compliance, mass distribution and contact forces in cursorial and scansorial locomotion with biorobotic physical models” (DOI, video) -
2021 | Advanced Intelligent Systems
Y. Lin, R. Siddall, F. Schwab, T. Fukushima, H. Banerjee, Y. Baek, D. Vogt, Y. Park and A. Jusufi, “Modeling and control of a soft robotic fish with controllable stiffness and integrated soft sensing” (DOI, video) -
2014 | Transactions of the Society of Instrument and Control Engineers, vol. 50, no. 1, pp. 51–57
T. Fukushima, K. Hyodo, M. Kawanishi and T. Narikiyo, “Gait stabilization of passive dynamic walking by foot shape optimization” (DOI) -
2014 | Advanced Robotics, vol. 28, no. 7, pp. 487–496
S. Nishikawa, K. Tanaka, K. Shida, T. Fukushima, R. Niiyama and Y. Kuniyoshi, “A musculoskeletal bipedal robot designed with angle-dependent moment arm for dynamic motion from multiple states” (DOI)
Conferences
-
2021 | SICB
T. Fukushima, R. Siddall, G. Byrnes, J. Nyakatura, S. L. D. Toussaint and A. Jusufi, “Self-righting in squirrels during unexpected falls – towards the crucial function of bushy tails in arboreal mammals” (DOI) -
2015 | Humanoids
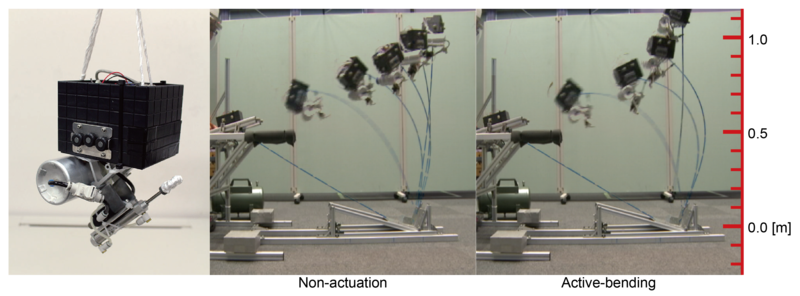
S. Nishikawa, T. Kobayashi, T. Fukushima and Y. Kuniyoshi, “Pole vaulting robot with dual articulated arms that can change reaching position using active bending motion” (DOI) -
2014 | ICRA
T. Fukushima, S. Nishikawa and Y. Kuniyoshi, “Active bending motion of pole vault robot to improve reachable height” (DOI) -
2013 | ICAR
S. Nishikawa, T. Fukushima and Y. Kuniyoshi, “Effective timing of swing-up motion by a pole-vaulting robot” (DOI) -
2013 | AMAM
T. Fukushima, S. Nishikawa, K. Tanaka and Y. Kuniyoshi, “Transitional buckling model for active bending effect in pole vault” -
other 7 domestic conference papers (in Japanese)
Thesis
-
2014 | Master’s thesis, The University of Tokyo (in Japanese)
“Active bending motion of pole vault robot to improve vaulting height” -
2012 | Bachelor’s thesis, Toyota Technological Institute (in Japanese)
“Gait stabilization of passive dynamic walker by foot shape optimization”
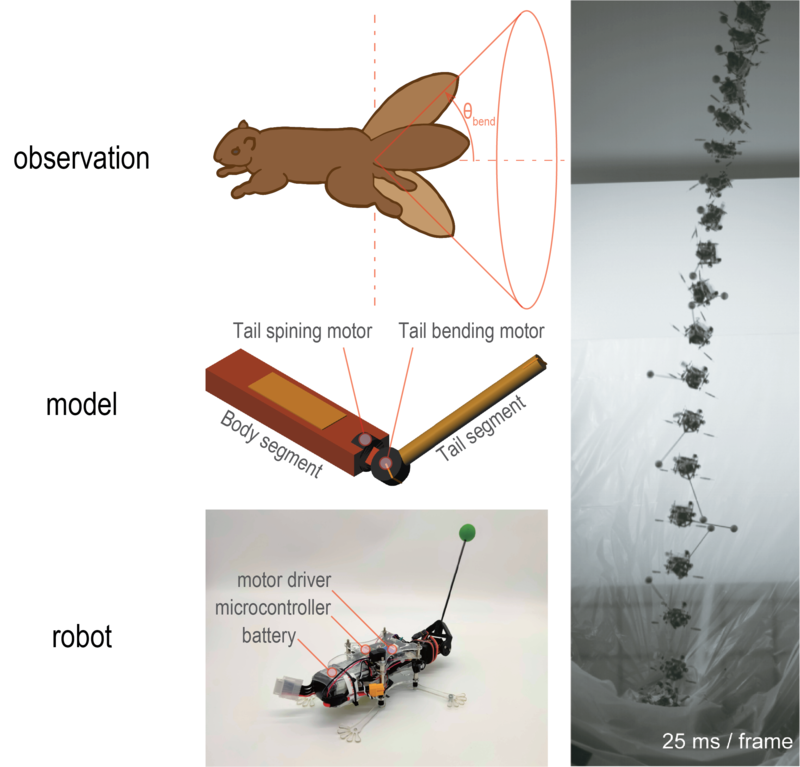
Squirrels recover from unexpected falls with their tails which weight only 3% of their body mass
Inertial Tail Effects during Righting of Squirrels in Unexpected Falls: From Behavior to Robotics: T. Fukushima, R. Siddall, F. Schwab, S. L. D. Toussaint, G. Byrnes, J. A. Nyakatura, and A. Jusufi (2021), https://doi.org/10.1093/icb/icab023
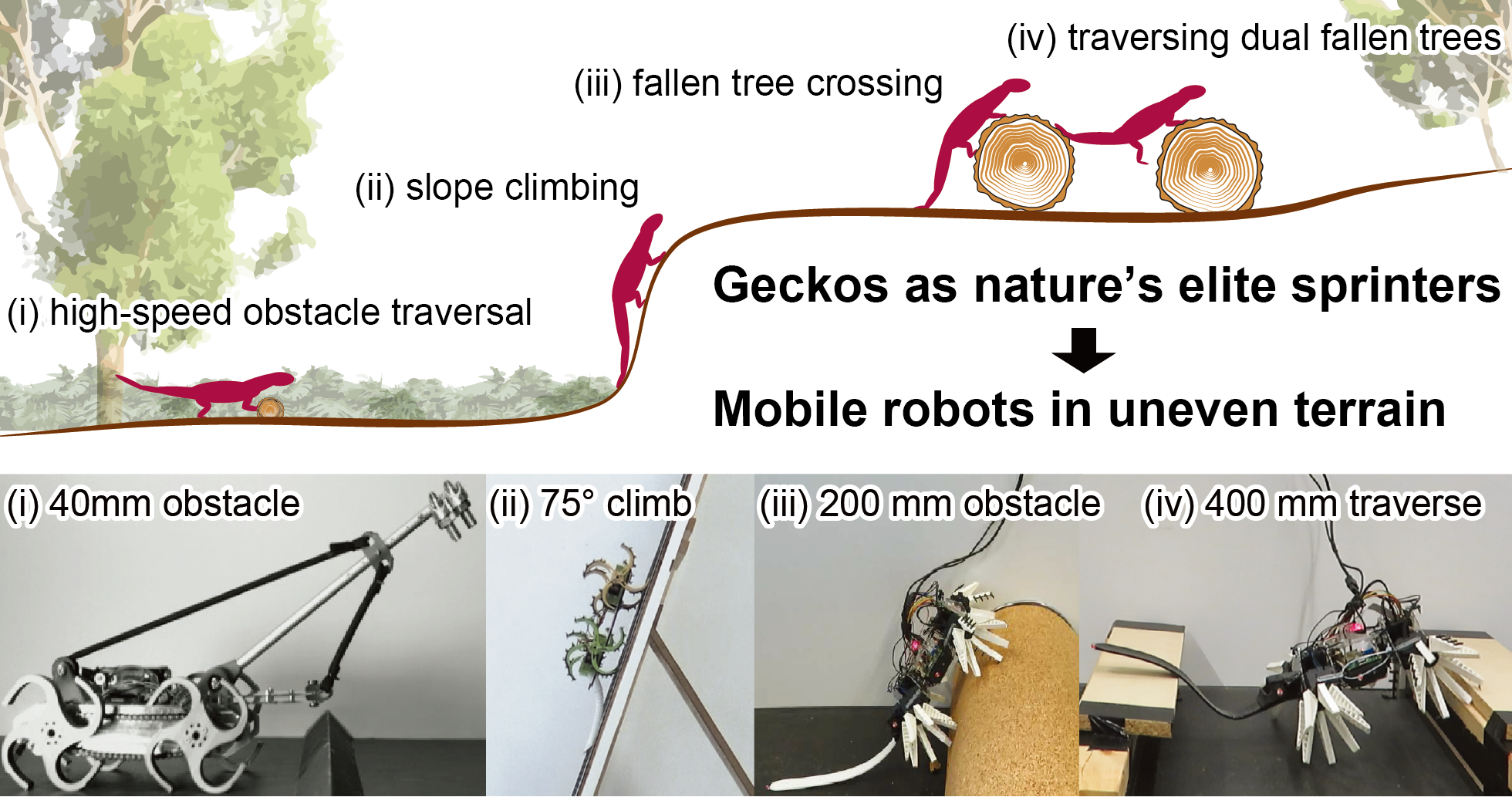
Tailed Animal Agility Inspires Robot Parkour Traversal Using Soft Materials
Compliance, mass distribution and contact forces in cursorial and scansorial locomotion with biorobotic physical models: R. Siddall, T. Fukushima, D. Bardhi, B. Perteshoni, A. Morina, E. Hasimja, Y.Dujaka, G. Haziri, L. Martin, H. Banerjee, and A. Jusufi (2021), https://doi.org/10.1080/01691864.2021.1887760
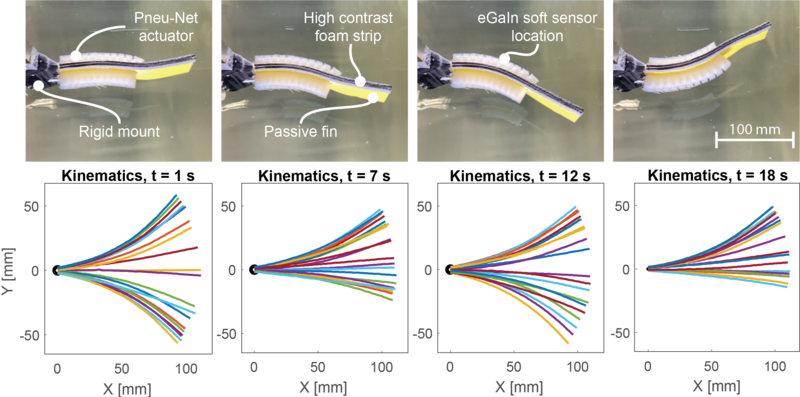
Modeling and Control of Soft Robotic Fish
Modeling and Control of a Soft Robotic Fish with Integrated Soft Sensing: Y.-H. Lin, R. Siddall, F. Schwab, T. Fukushima, H. Banerjee, Y. Baek, D. Vogt, Y.-L. Park, A. Jusufi, https://doi.org/10.1002/aisy.202000244
Toyota i-ROAD
The world's first Active Lean Mobility