Modeling and Control of a Soft Robotic Fish with Integrated Soft Sensing
2021
Article
bio
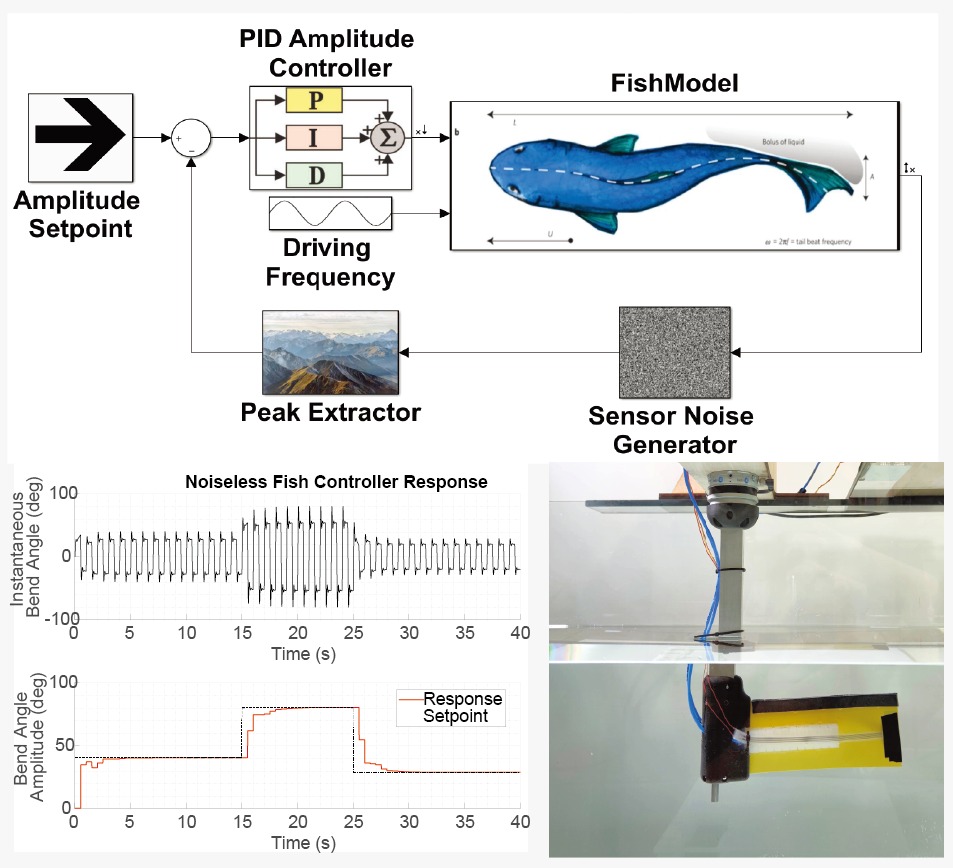
Soft robotics can be used not only as a means of achieving novel, more lifelike forms of locomotion but also as a tool to understand complex biomechanics through the use of robotic model animals. This paper presents the control of the undulation mechanics of an entirely soft robotic subcarangiform fish, using antagonistic fast-PneuNet actuators and hyperelastic eutectic Gallium-Indium (eGaIn) embedded in silicone channels for strain sensing. To design a controller, a simple, data-driven lumped parameter approach is developed, which allows accurate but lightweight simulation, tuned using experimental data and a genetic algorithm. The model accurately predicts the robot's behavior over a range of driving frequencies and a range of pressure amplitudes, including the effect of antagonistic co-contraction of the soft actuators. An amplitude controller is prototyped using the model and deployed to the robot to reach the setpoint of a tail-beat amplitude using fully soft and real-time strain sensing.
| Author(s): | Lin, Yu-Hsiang and Siddall, Robert and Schwab, Fabian and Fukushima, Toshihiko and Banerjee, Hritwick and Beak, Youngjoon and Vogt, Daniel and Park, Yong-Lae and Jusufi, Ardian |
| Journal: | Advanced Intelligent Systems |
| Volume: | 5 |
| Number (issue): | 4 |
| Pages: | 2000244 |
| Year: | 2021 |
| Month: | March |
| Day: | 17 |
| Publisher: | Wiley Online Library |
| Department(s): | Locomotion in Biorobotic and Somatic Systems |
| Research Project(s): |
Soft Sensory Control of Robotic Fish
|
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1002/aisy.202000244 |
| State: | Published |
|
BibTex @article{lbss_ais_fish,
title = {Modeling and Control of a Soft Robotic Fish with Integrated Soft Sensing},
author = {Lin, Yu-Hsiang and Siddall, Robert and Schwab, Fabian and Fukushima, Toshihiko and Banerjee, Hritwick and Beak, Youngjoon and Vogt, Daniel and Park, Yong-Lae and Jusufi, Ardian},
journal = {Advanced Intelligent Systems},
volume = {5},
number = {4},
pages = {2000244},
publisher = {Wiley Online Library},
month = mar,
year = {2021},
doi = {10.1002/aisy.202000244},
month_numeric = {3}
}
|
|