
Robert Siddall
Alumni
Note: Robert Siddall has transitioned from the institute (alumni).
I've moved to a new position as a lecturer in the UK. Find me here
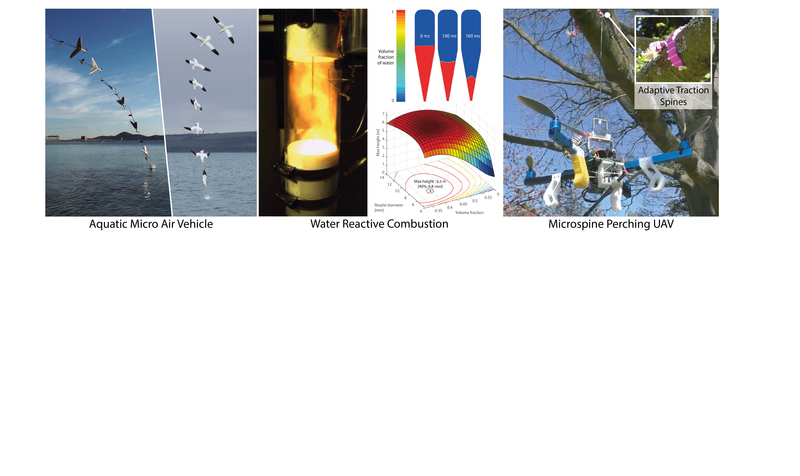
I'm an aerospace engineer and roboticist with an enthusiasm for unconventional mechatronics, who has come to MPI-IS on a Humboldt Fellowship to work on a set of miniature robots paired with new biomechanics data from nature. These bioinspired robots will be used to explore some of the most challenging behaviors in the natural world, including climbing, gliding and other arboreal acrobatics.
I received my Master’s degree in Aerospace Engineering from the University of Cambridge and my PhD in Aeronautics from Imperial College London, where my thesis on Aerial-Aquatic locomotion won the ‘Best UK PhD in Robotics Award’. Before moving to Germany I was the engineering lead in an ESA-funded startup, developing a unique agricultural robot, while also conducting part-time research on multirotor aircraft at Imperial College
Robotics Mechatronics Aeronautics Biomechanics
Google Scholar | ORCID | Publons | Scopus | LinkedIn |
Journals
- 2019 Science Robotics, 'Consecutive aquatic jump-gliding with water-reactive fuel', R Zufferey, A Ortega Ancel, A Farinha, R Siddall, SF Armanini, M Nasr, RV Brahmal, G Kennedy, M Kovac link (link)
- 2019 Robotics and Automation Letters, 'SailMAV: Design and Implementation of a Novel Multi-Modal Flying Sailing Robot', Raphael Zufferey, Alejandro Ortega Ancel, Celia Raposo, Sophie Franziska Armanini, Andre Farinha, Robert Siddall, Ion Berasaluce, Haijun Zhu, Mirko Kovac (link)
- 2017 Royal Society Interface Focus, 'Wind and water tunnel testing of a morphing aquatic micro air vehicle', Robert Siddall, Alejandro Ortega Ancel and Mirko Kovac (link)
- 2017 Robotics and Automation Letters, 'Efficient Aerial-Aquatic Locomotion with a Single Propulsion System', Yu Herng Tan, Robert Siddall and Mirko Kovac (link)
- 2016 ASME/IEEE Transactions on Mechatronics, 'Fast Aquatic Escape with a Jet Thruster', Robert Siddall and Mirko Kovac (link)
- 2014 Bioinspiration & Biomimetics, 'Launching the AquaMAV: Bioinspired Design For Aerial Aquatic Robotic Platforms', Robert Siddall and Mirko Kovac (link)
Conferences
- 2020 Society for Comparative and Integrative Biology Annual Meeting, 'Modulation of Cranio-Caudal mass distribution facilitates obstacle traversal in a cursorial biorobotic model', Robert Siddall and Ardian Jusufi
- 2019 International Conference on Soft Robotics (RoboSoft), 'A Passively Adaptive Microspine Grapple for Robust, Controllable Perching', Hai-Nguyen Nguyen, Robert Siddall, Brett Stephens, Alberto Navarro-Rubio and Mirko Kovac (link)
- 2019 Living Machines, 'Heads or Tails? Cranio-Caudal Mass Distribution for Robust Locomotion with Biorobotic Appendages Composed of 3D-Printed Soft Materials', Robert Siddall, Fabian Schwab, Jenny Michel, James Weaver and Ardian Jusufi (link)
- 2019 AIAA Aviation 2019 Forum, 'Modelling and simulation of a bioinspired aquatic micro aerial vehicle', Sophie F Armanini, Robert Siddall and Mirko Kovac (link)
- 2017 International Conference on Intelligent Robots and Systems (IROS), 'Spidermav: Perching and stabilizing micro aerial vehicles with bio-inspired tensile anchoring systems', Ketao Zhang, Pisak Chermprayong, Talib Al-Hinai, Robert Siddall and Mirko Kovac (link)
- 2016 Soft Robotics: Trends, Applications and Challenges, 'Bio-inspired Soft Aerial Robots: Adaptive Morphology for High-Performance Flight', Sina Sareh, Robert Siddall, Talib Al-Hinai and Mirko Kovac (link)
- 2015 International Symposium on Robotics Research, 'Explosive Propulsion Strategies for Aquatic Take-off in Robotics', Robert Siddall, Grant Kennedy and Mirko Kovac (link)
- 2015 International Conference on Robotics and Automation (ICRA), 'A Water Jet Thruster for an Aquatic Micro Air Vehicle', Robert Siddall and Mirko Kovac (link)
- 2015 International Symposium on Adaptive Motion of Animals and Machines, 'Bioinspired Aerial-Aquatic Mobility for Miniature Robots', Robert Siddall and Mirko Kovac
- 2012 Suspension Processing & Suspension Engineering Rheology 'Velocity of sliding flow of a dense granular suspension down an inclined plane’, Digby Symons and Robert Siddall
Patents
- 2019 GB1717137.2 and PCT:408549GB/DJW/ELH, 'Device for Remote Monitoring and Activity', HayBeeSee Ltd.
- 2016 GB1701052.1, 'An electronic fluency device', Jordi Fernandez Oromi, Rowan Brackston, Van Dimitri Immerseel, Juan Marcos Garcia de la Cruz, Robert Siddall and James Bird}
Thesis
- Aerial-Aquatic Locomotion with Miniature Robots, Doctoral Thesis Imperial College London (link)
- Sliding Wet Granular Flow, Master's Thesis, University of Cambridge
Consecutive aquatic jump-gliding with water-reactive fuel
Science Robotics, 2019 (https://robotics.sciencemag.org/content/4/34/eaax7330
Aquatic Micro Air Vehicles for Water Health Monitoring
Winner: Best Robot Video AAAI Video Competition 2017 (http://aivideocompetition.org)