
2022
Khandelwal, P. C., Hedrik, T. L.
Combined effects of body posture and three-dimensional wing shape enable efficient gliding in flying lizards
Scientific Reports, 12, pages: 1793, February 2022 (article)
Chellapurath, M., Khandelwal, P., Rottier, T., Schwab, F., Jusufi, A.
Morphologically Adaptive Crash Landing on a Wall: Soft-Bodied Models of Gliding Geckos with Varying Material Stiffnesses
Advanced Intelligent Systems, 4(10):2200120, Wiley-VCH Verlag, Weinheim, 2022 (article)
Chellapurath, M., Walker, K. L., Donato, E., Picardi, G., Stefanni, S., Laschi, C., Giorgio-Serchi, F., Calisti, M.
Analysis of Station Keeping Performance of an Underwater Legged Robot
IEEE/ASME Transactions on Mechatronics, 27(5):3730-3741, IEEE, New York, NY, 2022 (article)
Siddall, R., Byrnes, G., Jusufi, A.
Gliding lizards crashing-landing head-first into tree trunks emulated by soft robots with active tail reflexes
In Integrative and Comparative Biology, 62, pages: S288-S289, Society of Integrative and Comparative Biology, Phoenix, AZ, 2022, Society for Integrative and Comparative Biology 2022 Annual Meeting (SICB 2022) (inproceedings)
Chellapurath, M., Jusufi, A.
Study on the role of body and tail orientation in dynamic running Locomotion of lizards using a bioinspired robot
In Integrative and Comparative Biology, 62, pages: S54-S55, Society of Integrative and Comparative Biology, Phoenix, AZ, 2022, Society for Integrative and Comparative Biology 2022 Annual Meeting (SICB 2022) (inproceedings)
Schwab, F., Wiesemüller, F., Mucignat, C., Park, Y., Lunati, I., Kovac, M., Jusufi, A.
Undulatory Swimming Performance Explored With a Biorobotic Fish Measured by Soft Sensors and Particle Image Velocimetry
Frontiers in Robotics and AI, 8, Frontiers Media, Lausanne, 2022 (article)
2021
Schwab, F., Lunsford, E. T., Hong, T., Wiesemüller, F., Kovac, M., Park, Y., Akanyeti, O., Liao, J. C., Jusufi, A.
Body Caudal Undulation measured by Soft Sensors and emulated by Soft Artificial Muscles
Integrative and Comparative Biology, 61(5):1955-1965, November 2021 (article)
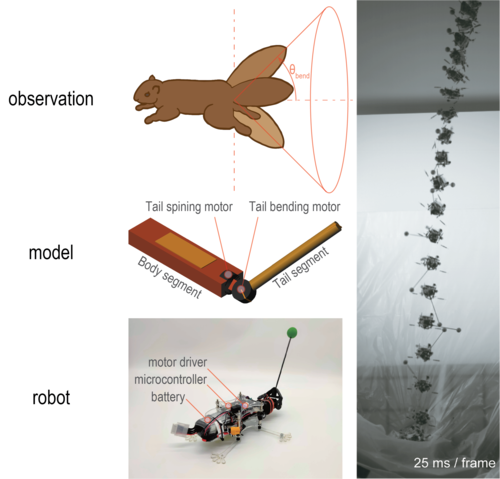
Fukushima, T., Siddall, R., Schwab, F., Séverine, T., Byrnes, G., Nyakatura, J. A., Jusufi, A.
Inertial Tail Effects During Righting of Squirrels in Unexpected Falls: From Behavior to Robotics
Integrative and Comparative Biology, 61(2):589-602, Oxford University Press, April 2021 (article)
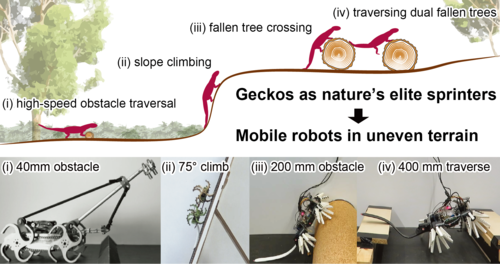
Siddall, R., Fukushima, T., Bardhi, D., Perteshoni, B., Morina, A., Hasimja, E., Dujaka, Y., Haziri, G., Martin, L., Banerjee, H., Jusufi, A.
Compliance, Mass Distribution and Contact Forces in Cursorial and Scansorial Locomotion with Biorobotic Physical Models
Advanced Robotics, 35(7):437-449, Taylor & Francis, April 2021 (article)
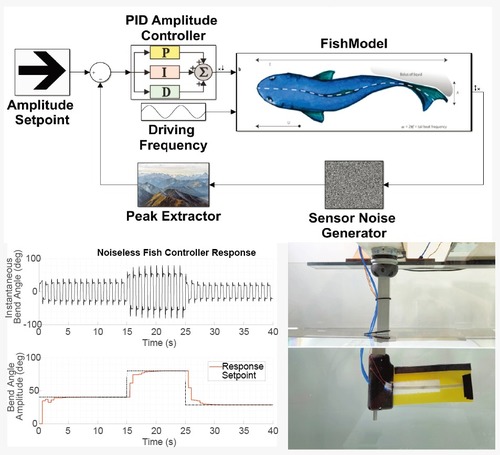
Lin, Y., Siddall, R., Schwab, F., Fukushima, T., Banerjee, H., Beak, Y., Vogt, D., Park, Y., Jusufi, A.
Modeling and Control of a Soft Robotic Fish with Integrated Soft Sensing
Advanced Intelligent Systems, 5(4):2000244, Wiley Online Library, March 2021 (article)
Patel, A., Jericevich, R., Knemeyer, A., Jusufi, A.
Cheetah tail behavior during pursuit
In Integrative and Comparative Biology, 61(Supplement 1):S5-5, Oxford University Press, Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2021), January 2021 (inproceedings)
Siddall, R., Ibanez, V., Byrnes, G., Full, R. J., Jusufi, A.
Tail responses facilitate lizard reorientation during directed aerial maneuverability
In Integrative and Comparative Biology, 61(Supplement 1):S5-4, Oxford University Press, Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2021), January 2021 (inproceedings)
Lin, Y., Siddall, R., Banerjee, H., Schwab, F., Jusufi, A.
Body and tail undulation measured and emulated by soft sensors provides insight on stiffness control through co-contraction
In Integrative and Comparative Biology, 61(Supplement 1):7-1, Oxford University Press, Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2021), January 2021 (inproceedings)
Fukushima, T., Siddall, R., Byrnes, G., Nyakatura, J. A., Toussaint, S., Ardian, J.
Self-righting in squirrels during unexpected falls – towards the crucial function of bushy tails in arboreal mammals
In Integrative and Comparative Biology, 61(Supplement 1):P11-2, Oxford University Press, Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2021), January 2021 (inproceedings)
Siddall, R., Byrnes, G., Full, R. J., Jusufi, A.
Tails stabilize landing of gliding geckos crashing head-first into tree trunks
Communications Biology, 4, pages: 1020, 2021 (article)
Banerjee, H., Sivaperuman Kalairaj, M., Ren, H., Jusufi, A.
Strong, Ultrastretchable Hydrogel-Based Multilayered Soft Actuator Composites Enhancing Biologically Inspired Pumping Systems
Advanced Engineering Materials, 23(10):2100121, 2021 (article)
Siddall, R., Ibanez, V., Byrnes, G., Full, R. J., Jusufi, A.
Mechanisms for Mid-Air Reorientation Using Tail Rotation in Gliding Geckos
Integrative and Comparative Biology, 61(2):478-490, Society of Integrative and Comparative Biology, McLean, VA, 2021 (article)
Schwaner, M. J., Hsieh, S. T., Braasch, I., Bradley, S., Campos, C. B., Collins, C. E., Donatelli, C. M., Fish, F. E., Fitch, O. E., Flammang, B. E., Jackson, B. E., Jusufi, A., Mekdara, P. J., Patel, A., Swalla, B. J., Vickaryous, M., McGowan, C. P.
Future Tail Tales: A Forward-Looking, Integrative Perspective on Tail Research
Integrative and Comparative Biology, 61(2):521-537, 2021 (article)
Shield, S., Jericevich, R., Patel, A., Jusufi, A.
Tails, Flails, and Sails: How Appendages Improve Terrestrial Maneuverability by Improving Stability
Integrative and Comparative Biology, 61(2):506-520 , 2021 (article)
2020
Siddall, R. J. D., Jusufi, A.
Modulation of Cranio-Caudal mass distribution facilitates obstacle traversal in a cursorial biorobotic model
In Integrative and Comparative Biology, 60(Supplement 1):E214-E214, Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2020), 2020 (inproceedings)
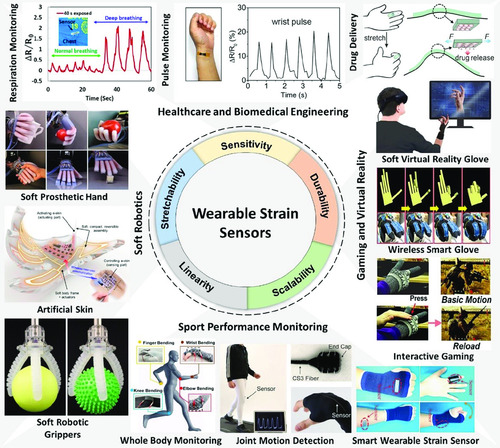
Souri, H., Banerjee, H., Jusufi, A., Radacsi, N., Stokes, A. A., Park, I., Sitti, M., Amjadi, M.
Wearable and stretchable strain sensors: materials, sensing mechanisms, and applications
Advanced Intelligent Systems, 2(8):2000039, 2020 (article)
Wolf, Z., Jusufi, A., Vogt, D. M., Lauder, G. V.
Fish-like aquatic propulsion studied using a pneumatically-actuated soft-robotic model
Bioinspiration & Biomimetics, 15(4):046008, Inst. of Physics, London, 2020 (article)
2019
Wright, Brian, Vogt, Daniel M., Wood, Robert J., Jusufi, Ardian
Soft Sensors for Curvature Estimation under Water in a Soft Robotic Fish
In 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft 2019), pages: 367-371, IEEE, Piscataway, NJ, 2nd IEEE International Conference on Soft Robotics (RoboSoft 2019), 2019 (inproceedings)
Jusufi, A., Vogt, D., Wood, R. J.
Co-Contraction facilitates Body Stiffness Modulation during Swimming with Sensory Feedback in a Soft Biorobotic Physical Model
In Integrative and Comparative Biology, 59(Supplement 1):E116-E116, Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2019), 2019 (inproceedings)
Siddall, R., Schwab, F., Michel, J., Weaver, J., Jusufi, A.
Heads or Tails? Cranio-Caudal Mass Distribution for Robust Locomotion with Biorobotic Appendages Composed of 3D-Printed Soft Materials
In Biomimetic and Biohybrid Systems, 11556, pages: 240-253, Lecture Notes in Artificial Intelligence, (Editors: Martinez-Hernandez, Uriel and Vouloutsi, Vasiliki and Mura, Anna and Mangan, Michael and Asada, Minoru and Prescott, Tony J. and Verschure, Paul F. M. J.), Springer, Cham, Living Machines 2019: 8th International Conference on Biomimetic and Biohybrid Systems, 2019 (inproceedings)
2018
Nirody, J., Jinn, J., Libby, T., Lee, T., Jusufi, A., Hu, D., Full, R.
Geckos Race across Water using Multiple Mechanisms
Current Biology, 2018 (article)
2017
Jusufi, A., Vogt, D., Wood, R., Lauder, G.
Undulatory Swimming Performance and Body Stiffness Modulation in a Soft Robotic Fish-like Physical Model
Soft Robotics, 2017 (article)
2012
Libby, T., Moore, T., Chang, E., Li, D., Cohen, D., Jusufi, A., Full, R.
Tail-assisted pitch control in lizards, robots and dinosaurs
Nature, 2012 (article)
Mongeau, J., McRae, B., Jusufi, A., Birkmeyer, P., Hoover, A., Fearing, R.
Rapid Inversion: Running Animals and Robots Swing like a Pendulum under Ledges
PLoS One, 2012 (article)
2011
Jusufi, A., Zeng, Y., Full, R., Dudley, R.
Aerial righting reflexes in flightless animals
Integ. Comp. Biol. , 2011 (article)
2010
Jusufi, A., Kawano, D., Libby, T., Full, R.
Righting and turning in mid-air using appendage inertia: reptile tails, analytical models and bio-inspired robots
IOP Bioinsp. Biomim., 2010 (article)
2008
Jusufi, A., Goldman, D., Revzen, S., Full, R.
Active tails enhance arboreal acrobatics in geckos
PNAS, 105(11):4215-4219, 2008 (article)