Under the direction of Dr. Ardian Jusufi, the scientists and engineers of the independent Max Planck Research Group Locomotion in Biorobotic and Somatic Systems study natural locomotion and the organismic bauplan that enables the graceful movement of animals in unstructured environments. The researchers apply their biological discoveries from animal experiments, capturing real-world behavior, to the creation of life-like robots with the vision to make robot movement indistinguishable from the elegant and efficient movements of animals - overall expanding the biomimetic robotic potential in real-world applications. Their research is at the nexus of engineering, materials, and biosciences.
The group conducts research in a variety of areas, and stands out as having experts in biological sciences, robotics, and material technologies. While the majority of today's robots are still constructed using stiff and hard components, soft robotics seeks to integrate malleable, flexible components into synthetic systems. To do this, scientists rely on the morphological intelligence inherent in mammals, insects, and reptiles' body structures, which enables them to move effectively and robustly. The interactions of stronger or stiffer material with softer or more flexible tissues are of special importance; animal movement involves a flawlessly coordinated action of all materials. Jusufi and his colleagues believe that by using these natural design principles and integrating morphological intelligence into swimming or climbing robots, such machines will be able to deal with more complicated situations and overcome barriers more efficiently.
The group’s research highlights include:
Investigating bio-inspired solutions for complex movement.
Here, we use non-invasive motion capture techniques to understand challenging locomotory behaviors including swimming, gliding, and perching in animals. Understanding each of these behaviors allows us to translate our findings to create novel biologically informed designs and mechanisms for robotic locomotion and thus making robotic movements more realistic and applicable in a variety of real-world situations.
Soft material manufacturing.
A key requirement to create life-like robotic movements is to fabricate actuators and sensors that are soft and capable of generating movements that conventional rigid actuators cannot. We have drawn inspiration from how animals sense their environment and sensors that can track changes in body orientation to enhance the control of robotic systems.
However, the scientists' goal extends beyond that; understanding how animals move and why by developing life-like robots, they may be able to answer evolution's design choices, and allow the scientists to gain previously unknown insights into the animals’ underlying sensory and locomotory mechanisms. Ultimately, the scientists want to acquire a better knowledge of both animals and technology.

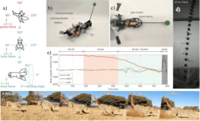
Multi-Modal Aerial Locomotion with Soft Robotic Landing on a Wall
Landing on a vertical substrate after flight is one of the most dramatic transitions in multi-modal locomotion. Geckos' remarkable climbing abilities endow them with agility that is rarely matched in nature. They can rapidly climb up smooth vertical surfaces and even move on an upside-down ceiling due to their extremely speciali... Read More
Robustness and Transition in aerial and terrestrial locomotion
Depending on the species of animal the tail is attached to, it can have extraordinarily multi-functional purposes. Tails help the animals to navigate in challenging environments by providing more agility and maneuverability. For example, arboreal mammals like squirrels demonstrate impressive agility while jumping from branches to br... Read More

Soft Sensory Control of Robotic Fish
Soft robotics may be utilized to create new, more lifelike types of locomotion as well as to comprehend complex biomechanics using robotic model platforms. We built a fully soft robotic subcarangiform fish based on prior results on undulatory movement in fish, using antagonistic fast-PneuNet actuators and hyperelastic eutectic Galli... Read More

Soft Actuator Composites
We need artificial soft muscles to create new soft robots capable of securely interacting in close proximity with humans as well as performing complex tasks in spaces that are difficult to reach. These devices would ideally be entirely soft, as powerful as genuine muscles, and electrically driven to facilitate integration with the r... Read More