[Nature] Communications Biology – Tails stabilize Landing of gliding Geckos crashing Head-First Into Tree Trunks
PUBLICITY INFORMATION FOR: R. Siddall, G. Byrnes, R. Full, and A. Jusufi* (2021).
*Please contact: ardian@is.mpg.de
On publication, our paper will be freely available online at: https://www.nature.com/articles/s42003-021-02378-6.
THIS IS A PRIVATE WEBSITE. All information is embargoed with immediate effect until 1600 London time (BST) / 1100 US Eastern Time on Thursday 2nd September 2021. Any access to this information is logged.
ALL GRAPHICAL MATERIAL (movies, images) IS COPYRIGHTED AND MAY BE USED FOR NEWS PURPOSES ONLY WITH APPROPRIATE CREDIT. ALL MATERIAL FROM THE ARTICLE SHOULD BE CREDITED AS COPYRIGHT Communications Biology 2021. ALL OTHER MATERIAL SHOULD BE CREDITED AS STATED WITH PHOTO CREDIT IF INCLUDED.
Authors
Robert Siddall and Ardian Jusufi*, Locomotion in Biorobotic and Somatic Systems, Max-Planck-Institute for Intelligent Systems, Germany.
E-mail: rob@is.mpg.de,*Corresponding author: ardian@is.mpg.de. Phone ++491743230725
Greg Byrnes. Biology Department. Siena College, NY, USA.
E-mail: gbyrnes@siena.edu
Robert Full. Department of Integrative Biology, University of California at Berkeley, CA, USA. Phone ++1 510 642 9896 (office) or ++1 510-332-7484 (mobile) e-mail: rjfull@berkeley.edu
Max-Planck-Institut für Intelligente Systeme,
Locomotion in Biorobotic and Somatic Systems Visit
Paper Figures
Figure 1 (DOI: 10.1038/s42003-021-02378-6, Credit: Ardian Jusufi Lab, CC BY 4.0)
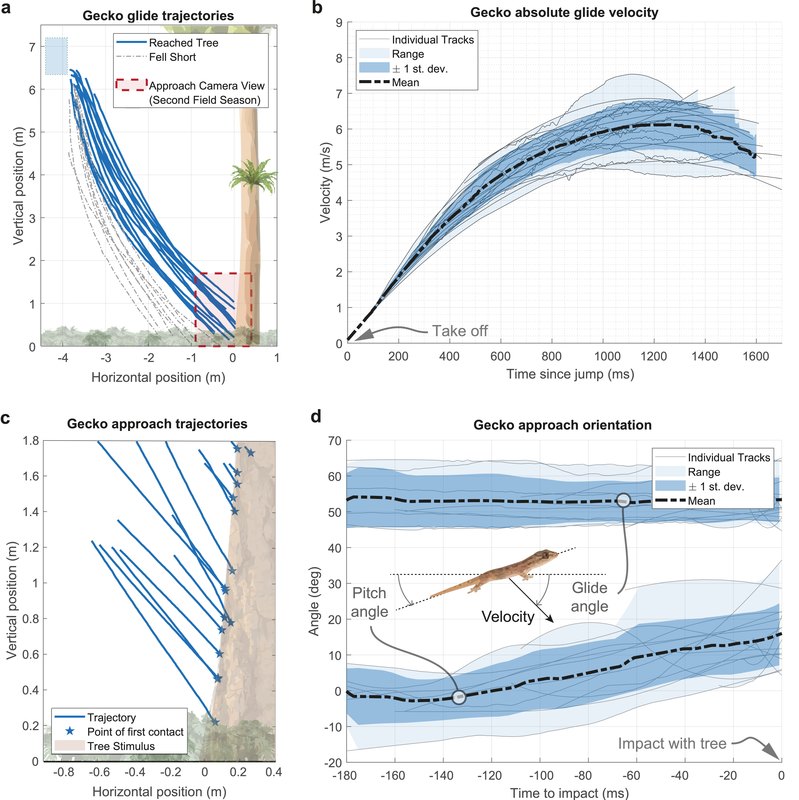
Figure 2 (DOI: 10.1038/s42003-021-02378-6, Credit: Ardian Jusufi Lab, CC BY 4.0):
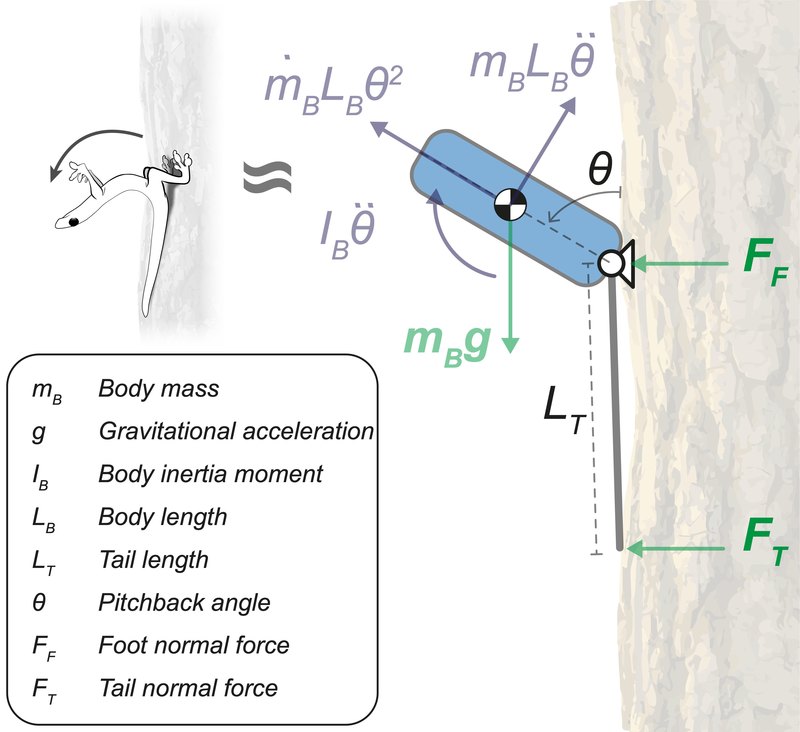
Figure 3 (DOI: 10.1038/s42003-021-02378-6, Credit: Ardian Jusufi Lab, CC BY 4.0):
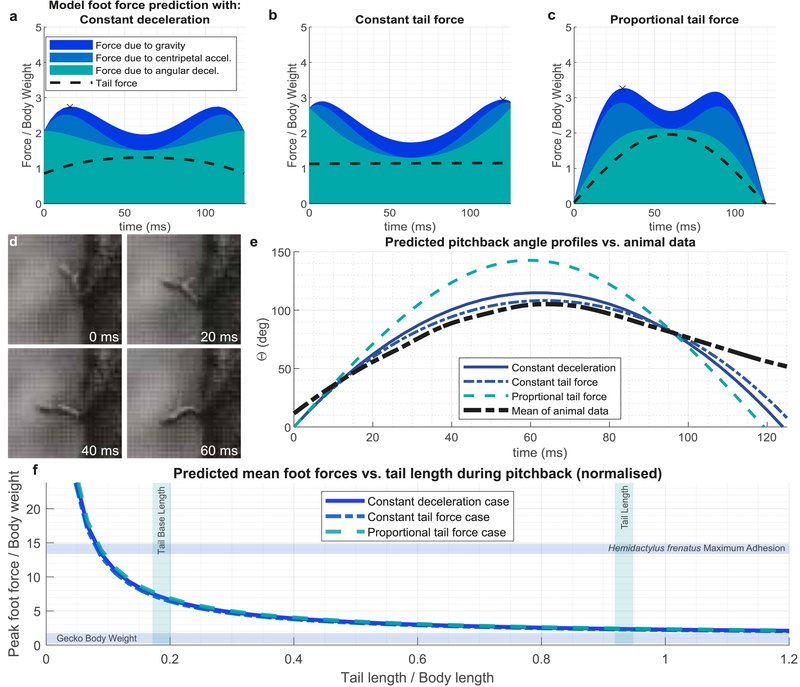
Figure 4 (DOI: 10.1038/s42003-021-02378-6, Credit: Ardian Jusufi Lab, CC BY 4.0):
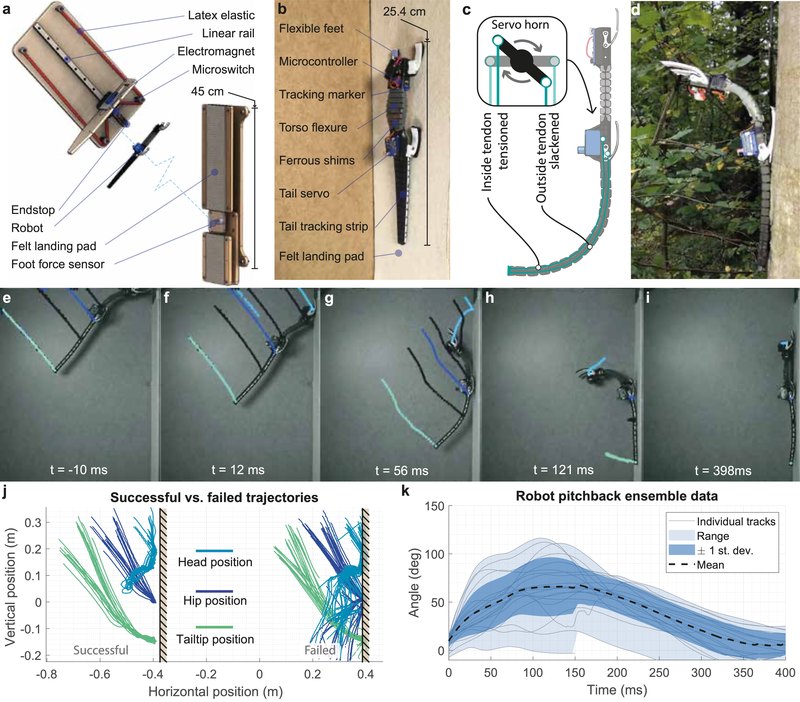
Figure 5 (DOI: 10.1038/s42003-021-02378-6, Credit: Ardian Jusufi Lab, CC BY 4.0):
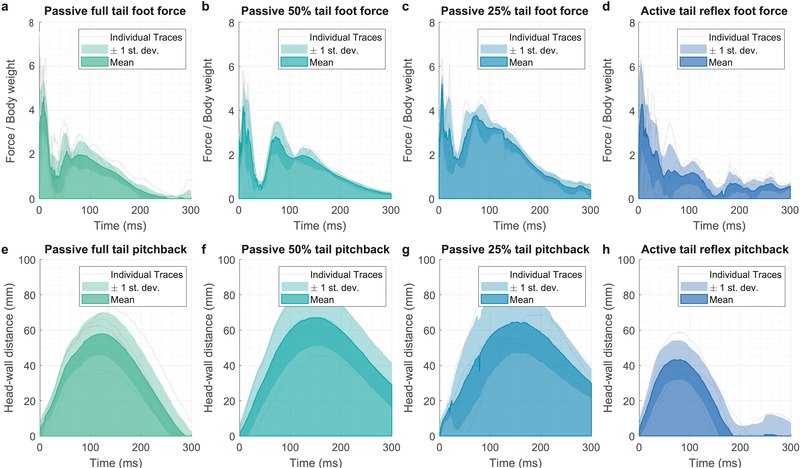
Figure 6 (DOI: 10.1038/s42003-021-02378-6, Credit: Ardian Jusufi Lab, CC BY 4.0):
Additional Images
Photo 1: Gecko after landing on tree trunk. Credit: Photo by Ardian Jusufi

Photo 2: Gecko on rainforest leaf. Credit: Photo by Ardian Jusufi

Image 3: Field photo of gecko post landing (Ardian Jusufi), Fall Arresting Response (Andre Wee), and Soft robotic lander.

The Asian flat-tailed gecko would prefer a four-point landing after leaping to a tree trunk, but if it can't slow down sufficiently, it may have to crash head first into the trunk, rebounding but stabilizing itself with its tail. Researchers at the MPI-IS in Germany built a soft robot with active tail to recreate this behavior. Photos by Ardian Jusufi, illustration by Andre Wee.
Image 4: Gliding gecko (Peter Bräm), Fall Arresting Response (Andre Wee), Soft robotic lander and field photo of gecko post landing (Ardian Jusufi).

Image 5: Illustration of Fall Arresting Response (FAR). Credit: Andre Wee
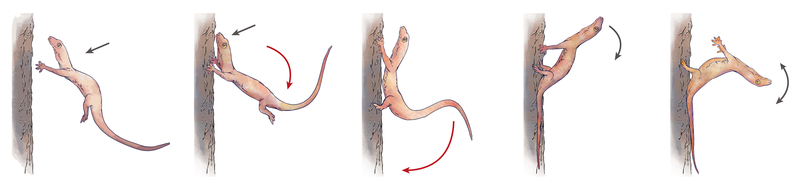


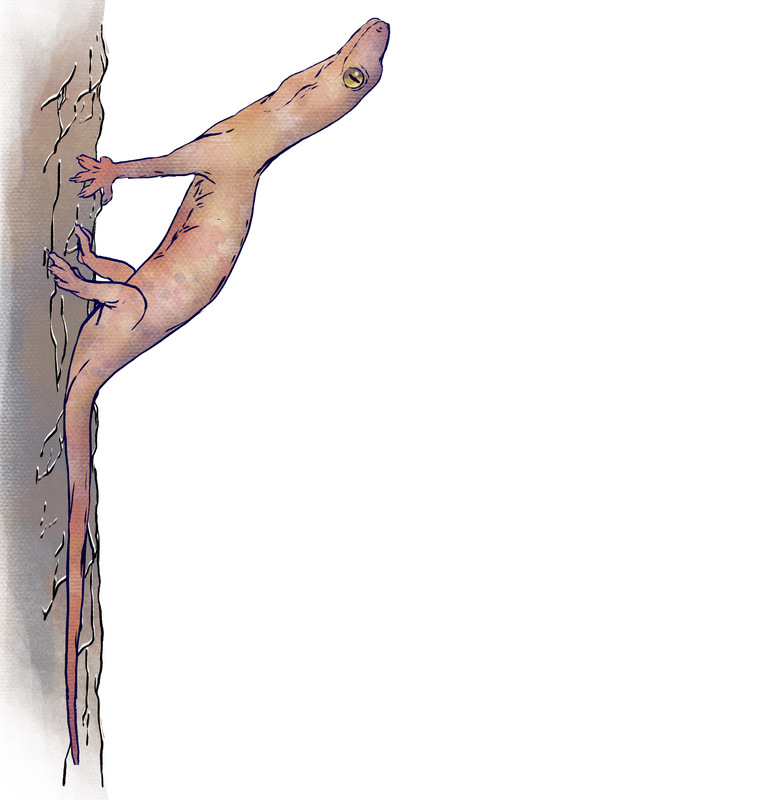
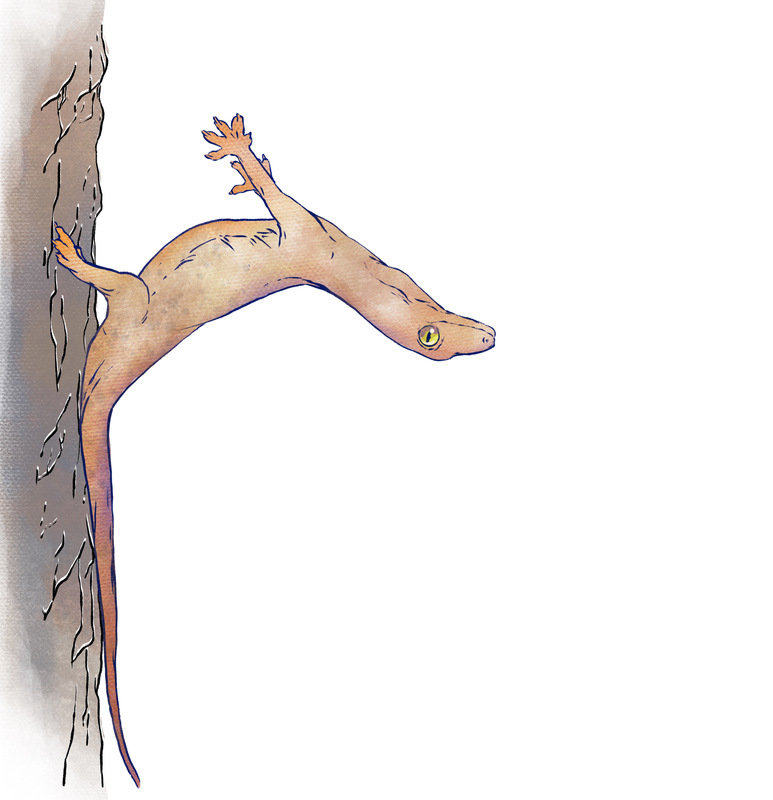
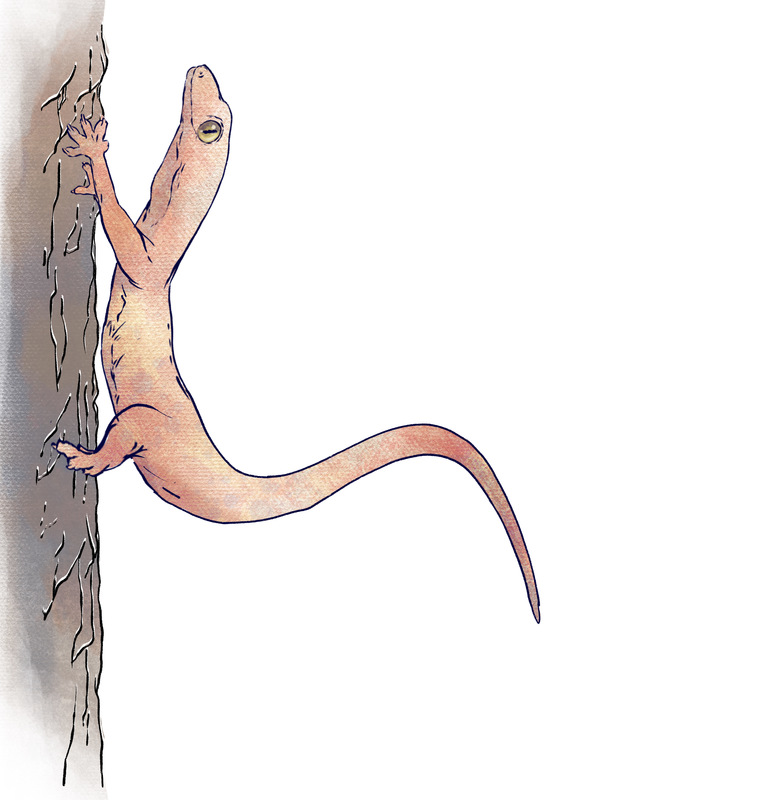
Image 6: Illustration of Fall Arresting Response (FAR). Credit: Peter Braem
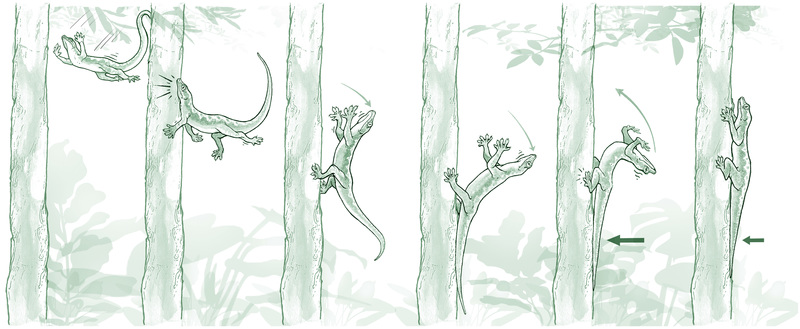
Image 7: Illustration of Fall Arresting Response (FAR). Credit: Felipe Vargas

Image 8: Illustration of Landing process. Credit: Ella Maru Studio
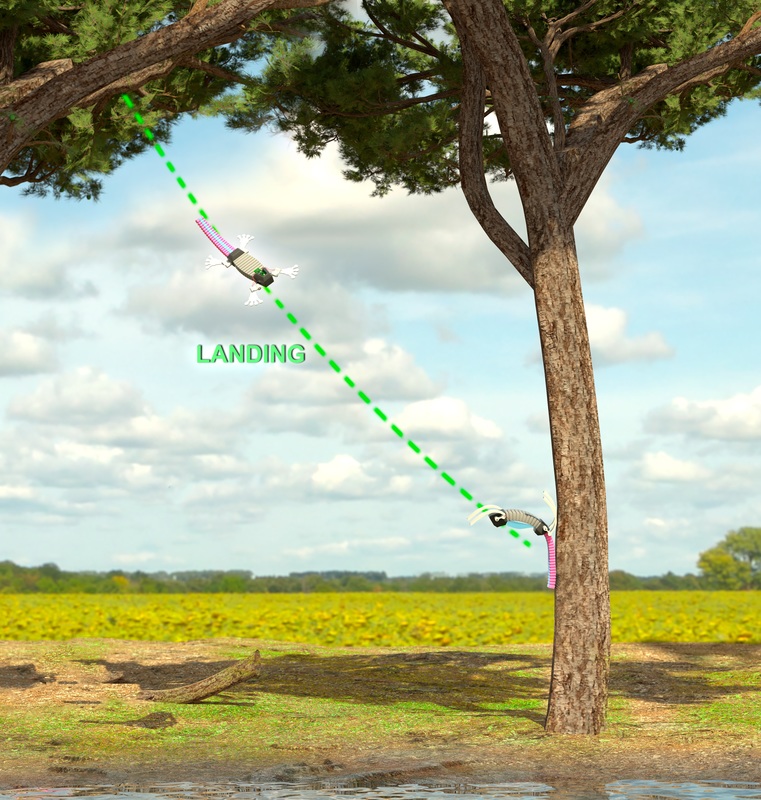
Image 9: Landing Robot. Credit: Ardian Jusufi Lab

Image 10: Landing Robot. Credit: Ardian Jusufi Lab

Image 11: Portrait of Ardian Jusufi, holding the landing robot. Credit: Ardian Jusufi Lab

Videos
Summary Video: Original footage from the Southeast Asian rainforest. Narrated by Ardian Jusufi (voice). Credit: Ardian Jusufi Lab, CC BY 4.0. Communications Biology 2021 (DOI: 10.1038/s42003-021-02378-6)
Supplementary Movie 1: Original footage from the Southeast Asian rainforest Credit: Ardian Jusufi Lab, CC BY 4.0. Communications Biology 2021 (DOI: 10.1038/s42003-021-02378-6)
Supplementary Movie 2: Soft Robotic Model used To investigate Landing Mechanics Credit: Ardian Jusufi Lab, CC BY 4.0. Communications Biology 2021 (DOI: 10.1038/s42003-021-02378-6)
Supplementary Movie 3: Wall reaction foot force during soft robot perching. Credit: Ardian Jusufi Lab, CC BY 4.0. Communications Biology 2021 (DOI: 10.1038/s42003-021-02378-6)
Contact Information for Comments on Article from Investigators Not Involved in this Research
Professor Jake Socha (comparative biomechanics, gap-crossing)
Department of Biomedical Engineering and Mechanics
Virginia Tech University
E-mail: jjsocha@vt.edu
Professor Prof. David Lentink
Uroeningen University, Holland
E-Mail: d.lentink@rug.nl
Professor Sharon Schwartz
Department of Ecology and Evolutionary Biology, and Professor of Engineering
Brown University, USA.
E-Mail: Sharon_Swartz@brown.edu
Professor John Nyakatura
Professor for Comparative Zoology
Humboldt-University zu Berlin
E-Mail: john.nyakatura@hu-berlin.de
Professor Martin Whiting
Department of Biological Science
Macquarie University, Sydney
E-Mail: martin.whiting@mq.edu.au
Professor Tyson Hedrick (Flight dynamics)
Department of Biology
University of North Carolina
Chapel Hill, NC
E-Mail: thedrick@bio.unc.edu
Professor Rob Wood
Microrobotics Lab
Harvard, MA
E-Mail: rjwood@seas.harvard.edu