Compliance, Mass Distribution and Contact Forces in Cursorial and Scansorial Locomotion with Biorobotic Physical Models
2021
Article
bio
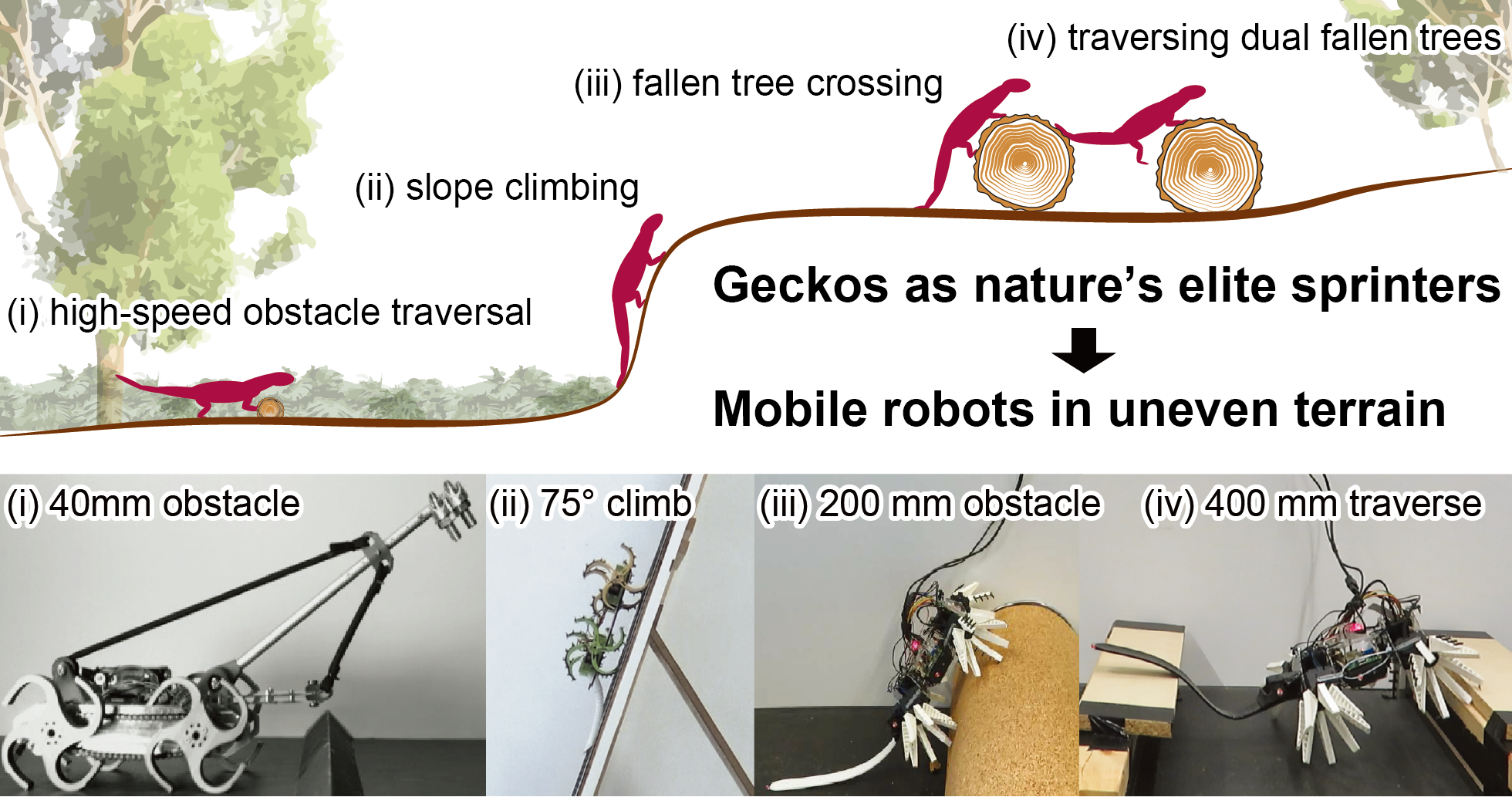
Locomotion in unstructured and irregular environments is an enduring challenge in robotics. This is particularly true at the small scale, where relative obstacle size increases, often to the point that a robot is required to climb and transition both over obstacles and between locomotion modes. In this paper, we explore the efficacy of different design features, using 'morphological intelligence', for mobile robots operating in rugged terrain, focusing on the use of active and passive tails and changes in mass distribution, as well as elastic suspensions of mass. We develop an initial prototype whegged robot with a compliant neck and test its obstacle traversal performance in rapid locomotion with varying its mass distribution. Then we examine a second iteration of the prototype with a flexible tail to explore the effect of the tail and mass distribution in ascending a slope and traversing obstacles. Based on observations from these tests, we develop a new platform with increased performance and a fin ray wheel-leg design and present experiments on traversing large obstacles, which are larger than the robot's body, of this platform with tails of varying compliance. This biorobotic platform can assist with generating and testing hypotheses in robotics-inspired biomechanics of animal locomotion.
| Author(s): | Siddall, Robert and Fukushima, Toshihiko and Bardhi, Drilon and Perteshoni, Buna and Morina, Albulena and Hasimja, Era and Dujaka, Yll and Haziri, Gezim and Martin, Lina and Banerjee, Hritwick and Jusufi, Ardian |
| Journal: | Advanced Robotics |
| Volume: | 35 |
| Number (issue): | 7 |
| Pages: | 437--449 |
| Year: | 2021 |
| Month: | April |
| Day: | 13 |
| Publisher: | Taylor & Francis |
| Department(s): | Locomotion in Biorobotic and Somatic Systems |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1080/01691864.2021.1887760 |
| Language: | eng |
| Attachments: |
preprint
|
|
BibTex @article{lbss_tadr,
title = {Compliance, Mass Distribution and Contact Forces in Cursorial and Scansorial Locomotion with Biorobotic Physical Models},
author = {Siddall, Robert and Fukushima, Toshihiko and Bardhi, Drilon and Perteshoni, Buna and Morina, Albulena and Hasimja, Era and Dujaka, Yll and Haziri, Gezim and Martin, Lina and Banerjee, Hritwick and Jusufi, Ardian},
journal = {Advanced Robotics},
volume = {35},
number = {7},
pages = {437--449},
publisher = {Taylor & Francis},
month = apr,
year = {2021},
doi = {10.1080/01691864.2021.1887760},
month_numeric = {4}
}
|
|