Inertial Tail Effects During Righting of Squirrels in Unexpected Falls: From Behavior to Robotics
2021
Article
bio
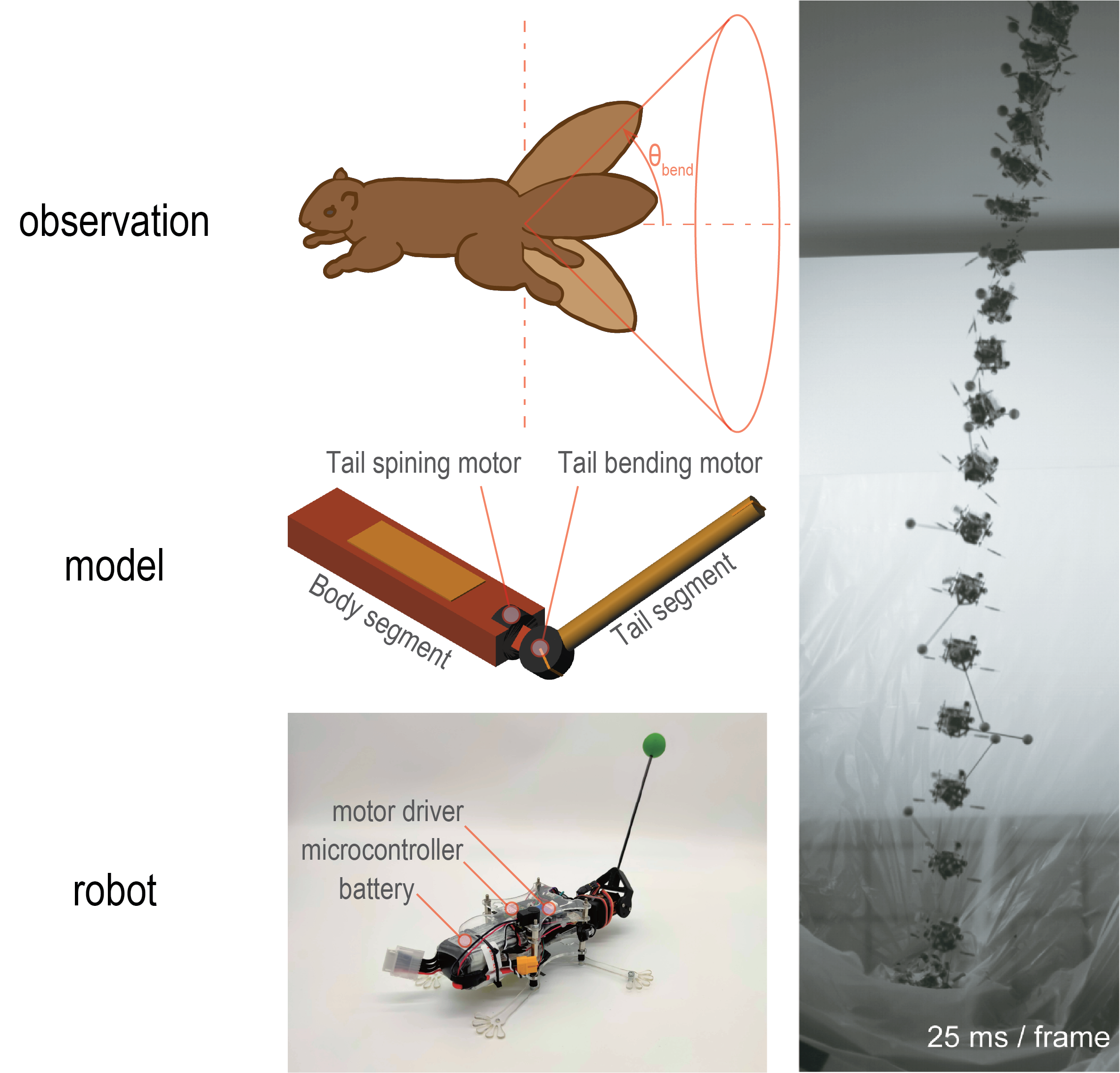
Arboreal mammals navigate a highly three dimensional and discontinuous habitat. Among arboreal mammals, squirrels demonstrate impressive agility. In a recent 'viral' YouTube video, unsuspecting squirrels were mechanically catapulted off of a track, inducing an initially uncontrolled rotation of the body. Interestingly, they skillfully stabilized themselves using tail motion, which ultimately allowed the squirrels to land successfully. Here we analyze the mechanism by which the squirrels recover from large body angular rates. We analyzed from the video that squirrels first use their tail to help stabilizing their head to visually fix a landing site. Then the tail starts to rotate to help stabilizing the body, preparing themselves for landing. To analyze further the mechanism of this tail use during mid-air, we built a multibody squirrel model and showed the righting strategy based on body inertia moment changes and active angular momentum transfer between axes. To validate the hypothesized strategy, we made a squirrel-like robot and demonstrated a fall-stabilizing experiment. Our results demonstrate squirrel's long tail, despite comprising just 3% of body mass, can inertially stabilize a rapidly rotating body. This research contributes to better understanding the importance of long tails for righting mechanisms in animals living in complex environments such as trees.
| Author(s): | Fukushima, Toshihiko and Siddall, Robert and Schwab, Fabian and Toussaint Séverine and Byrnes, Greg and Nyakatura, John A. and Jusufi, Ardian |
| Journal: | Integrative and Comparative Biology |
| Volume: | 61 |
| Number (issue): | 2 |
| Pages: | 589--602 |
| Year: | 2021 |
| Month: | April |
| Day: | 30 |
| Publisher: | Oxford University Press |
| Department(s): | Locomotion in Biorobotic and Somatic Systems |
| Research Project(s): |
Robustness and Transition in aerial and terrestrial locomotion
|
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1093/icb/icab023 |
| Language: | eng |
|
BibTex @article{lbss_2021_squirrel,
title = {Inertial Tail Effects During Righting of Squirrels in Unexpected Falls: From Behavior to Robotics},
author = {Fukushima, Toshihiko and Siddall, Robert and Schwab, Fabian and S\'{e}verine, Toussaint and Byrnes, Greg and Nyakatura, John A. and Jusufi, Ardian},
journal = {Integrative and Comparative Biology},
volume = {61},
number = {2},
pages = {589--602},
publisher = {Oxford University Press},
month = apr,
year = {2021},
doi = {10.1093/icb/icab023},
month_numeric = {4}
}
|
|