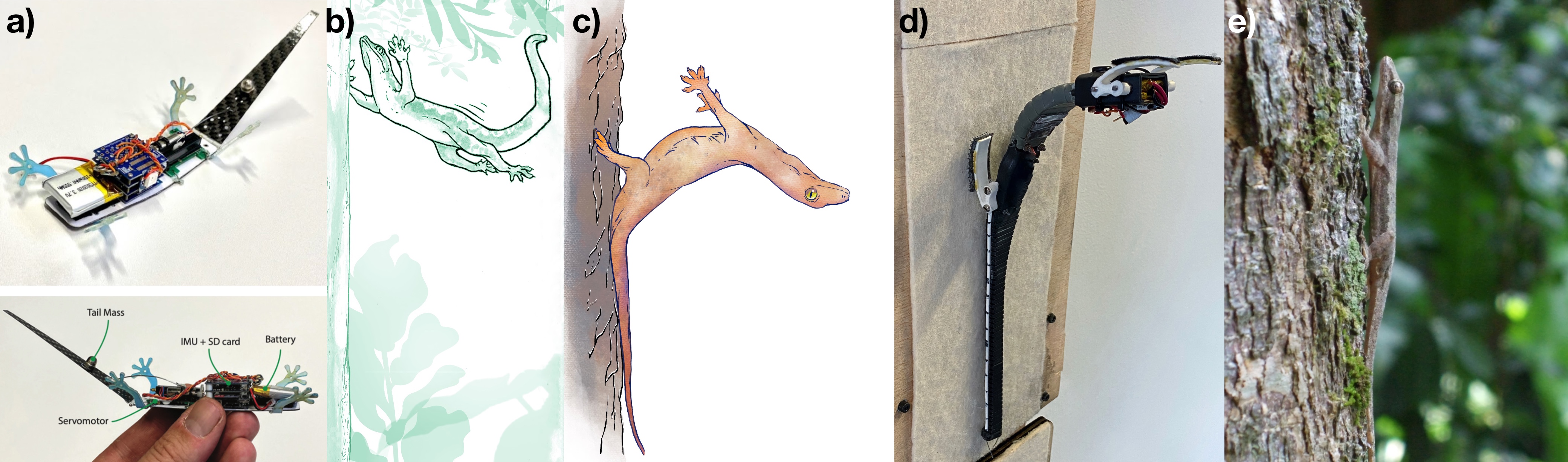
Images on multi-modal locomotion in the air and transition to a vertical substrate. Image descriptions from left to right. (a) Bio-inspired gecko robot capable of changing mid-air body pitch orientation using tail flexion. (b) Illustration of a lizard gliding in the field (Peter Bräm). (c) Illustration of Fall Arresting Response (Andre Wee). (d) Soft robotic lander (e) field photo of gecko post landing (Ardian Jusufi).
Landing on a vertical substrate after flight is one of the most dramatic transitions in multi-modal locomotion. Geckos' remarkable climbing abilities endow them with agility that is rarely matched in nature. They can rapidly climb up smooth vertical surfaces and even move on an upside-down ceiling due to their extremely specialized adhesive lamellae on their foot. In our most recent work, we discovered another gecko superpower: The multi-talented lizard known as Hemidactylus platyurus is capable of gliding and crash-landing on vertical trees.
In field studies in Southeast Asian rainforest, Dr. Ardian Jusufi deployed high-speed cameras and captured the gecko gliding from tree to tree, reaching a speed of up to 6 m/s (21 km/h) when landing on a tree. The animal cushions the impact by bending its torso backward by up to 100 degrees. The front foot lose grip during the bend and the back legs are the only ones that remain attached. Pushing the tail hard into the tree trunk, the gecko dissipates the energy. Lizards that have lost tails could not dissipate sufficient energy and fall from the tree. As a result, we postulate that the tail functions as a fifth leg, assisting the gecko in stabilizing itself following an impact.
To validate the hypothesis, we developed the gecko-inspired robot, a physical model platform that enables a better understanding of the forces encountered by the animal. It has a flexible torso and a detachable tail, and is programmed to bend upon impact, pushing the tail into the wall.
We launched the robot onto a vertical platform and measured the force applied to the robot's front and back feet upon contact. The longer the tail, the less force was required to move the back feet away from the surface. The lesser the applied force, the easier it is for the robot (and, most likely, the animal) to maintain its grip. However, without a tail, the pressures acting on the back feet become excessive, and the robot loses grip, bounces off, and falls from the platform.
We were able to measure something with the robot that we could not with geckos in the field. The wall reaction forces at impact proved that the tail plays a crucial role in achieving hard landings after subcritical glides. Not only does our soft robotic lander contribute to the advancement of another field, but it also has the potential to improve robot mobility by enhancing robustness and simplifying control.